Simulink与COMSOL协同仿真
需求背景
Matlab/Simulink用于控制系统仿真,COMSOL用于模型有限元仿真,如果有限元模型是控制系统的一部分,则需要将二者联立,实现Simulink和COMSOL的协同仿真。
COMSOL 3.5版本(包括之前的FEMLAB)以前,提供了导出COMSOL模型到Simulink的标准接口,但对于非线性模型来说,直接导出的模型不能直接使用。后续版本,COMSOL取消了直接导出Simulink的功能,与Simulink的连接方式也发生了变更。
思路上,Simulink的S-function支持用户自定义任意子系统,COMSOL模型可以直接保存为Matlab的”.m”文件,将其修改作为S-function的一部分直接导入到控制系统中即可。Simulink模型在仿真的过程中调用S函数,通过S函数对COMSOL的边界条件或物理参数进行修改,其后COMSOL执行一个仿真步,获取COMSOL执行该仿真步的结果并传递给Simulink,作为Simulink执行下一步的参数设置依据。
Demo:模拟温度控制系统
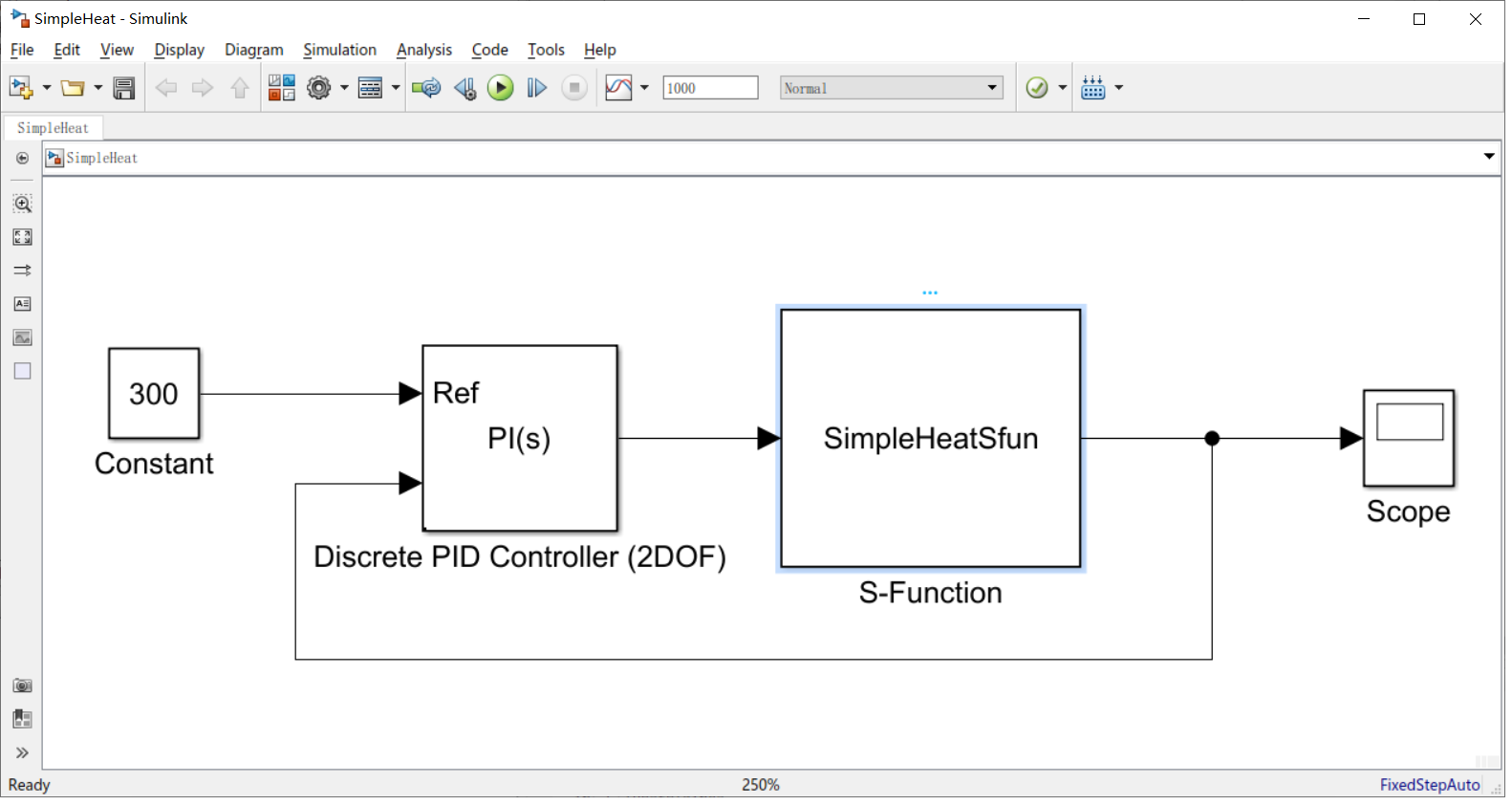
如下图所示一个简单的温度控制系统,PID控制系统的输出功率,S-Function调用COMSOL对指定功率的模型做传热分析,计算得到温度结果与参比温度(300K)进行比较,温度低则提高控制系统输出功率,温度高则降低控制系统输出功率。多次迭代后,使系统输出温度稳定在参比温度附近。
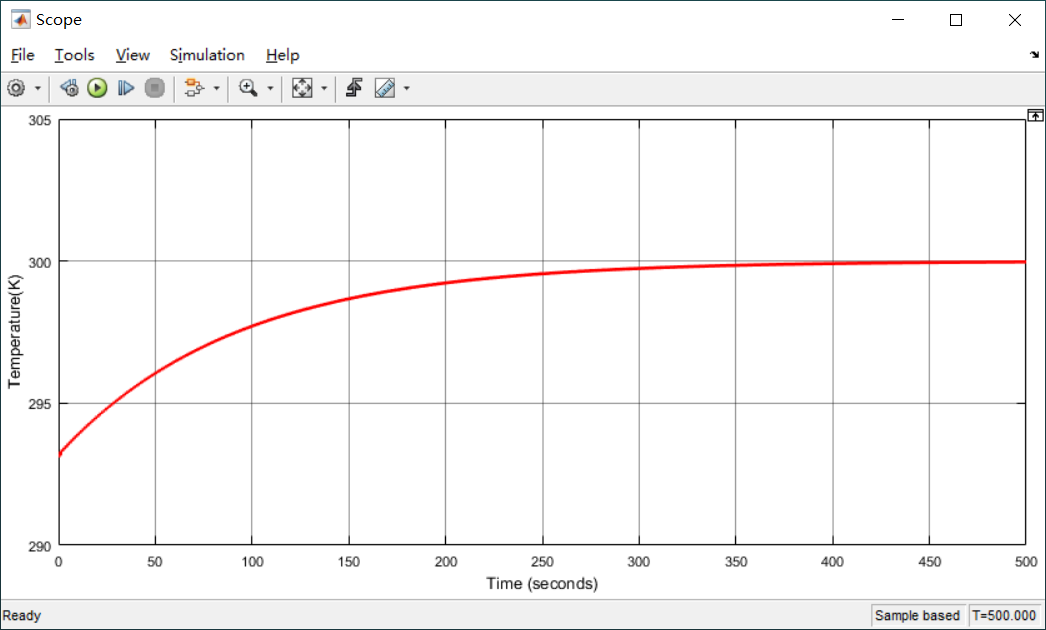
计算过程中实时监控的温度变化曲线如下。初始温度为293.15K,初始加热功率为0W/m3,PID控制器自动调高输出功率,最终COMSOL计算得到的监测点温度逐渐逼近参比温度300K。
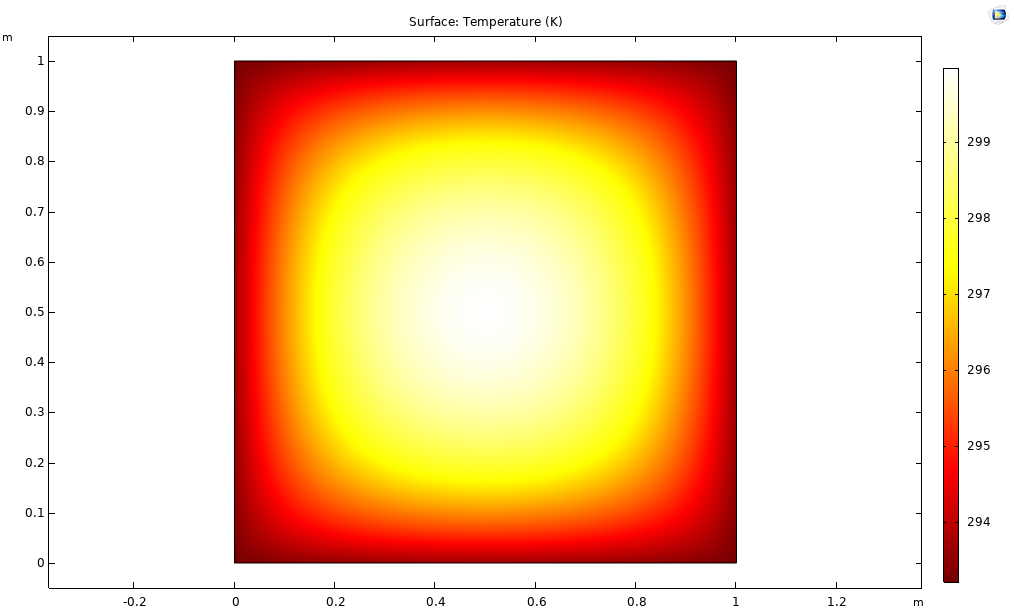
监测点(中心点)温度达到参比温度时,COMSOL传热计算结果如下,此时,PID控制器输出的功率为155.5893W/m3。
对模型设置感兴趣,请联系作者。
This post is licensed under CC BY 4.0 by the author.